Automated design of a task specific machine
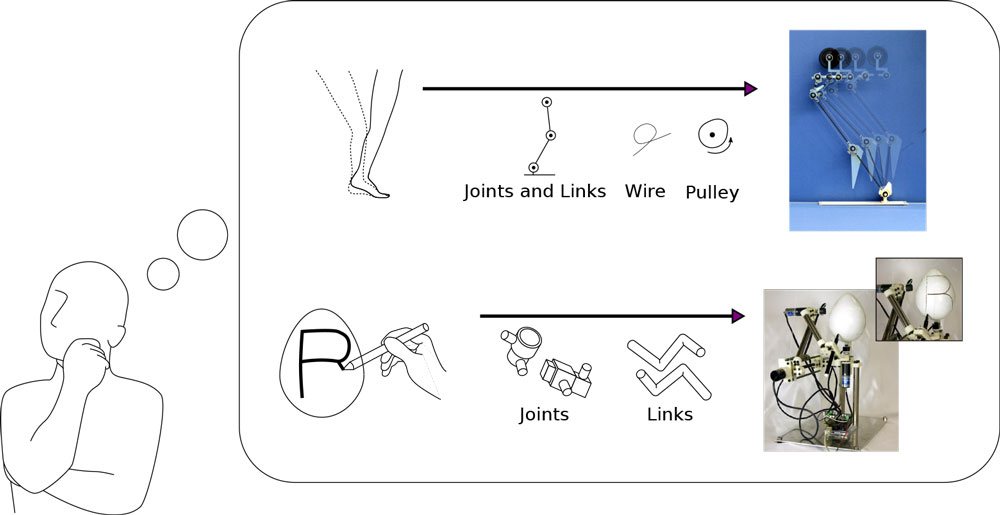
A machine can perform more efficiently and more accurately by a specific structure for a task than a general-purpose machine. However, in many cases, it is not easy to design it by human intuition and manual work. In this project, we have been proposing the methods to create a machine according to a given task by analysis or optimization. For example, we have introduced the way to design the constraints of the motion of joints in linkage using a wire. We also have proposed the way to design joint displacements of a robotic manipulator to follow a given trajectory with a smaller number of motors.