Human neuromusculoskeletal modeling for understanding the mechanism of stance
postural control
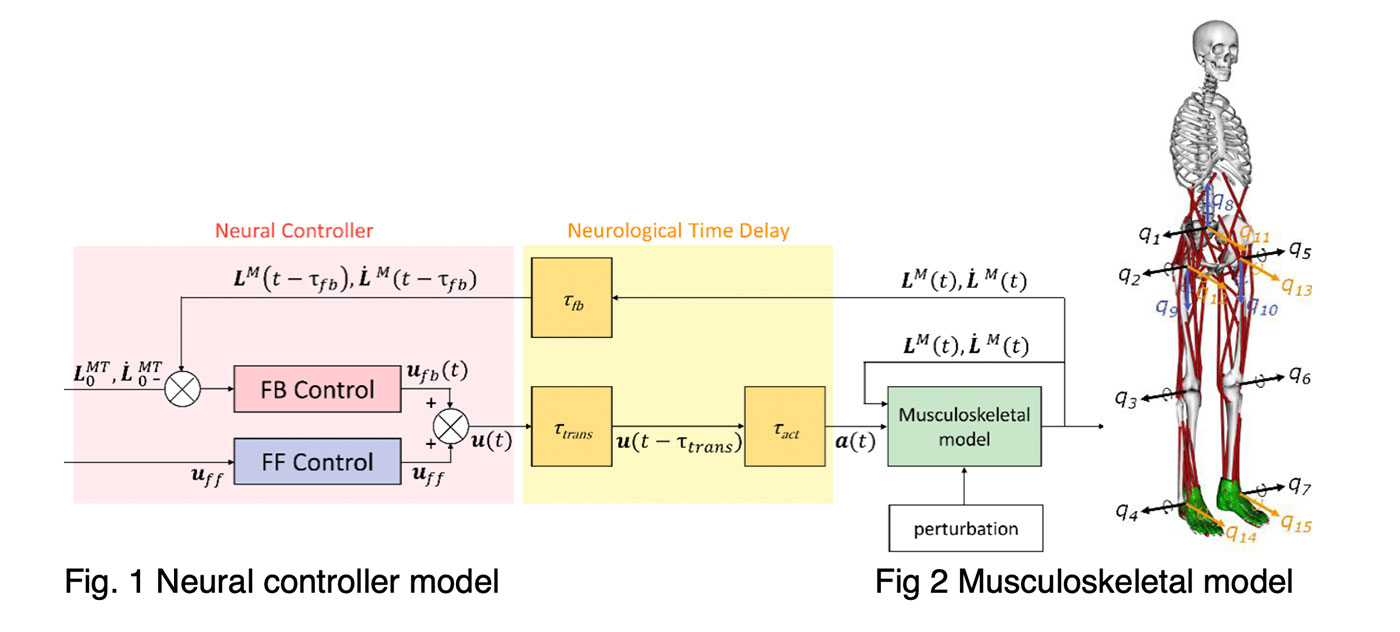
Humans perform stance postural control with many muscles activation by integrating sensor information such as visual, vestibular, and somatosensory. Understanding the mechanism of the control is essential to provide effective rehabilitation. We aim to clarify the mechanism through the construction of a neural controller model (Fig. 1) to keep a musculoskeletal model (Fig. 2) in a stance posture.
Robot patient for nursing skill training
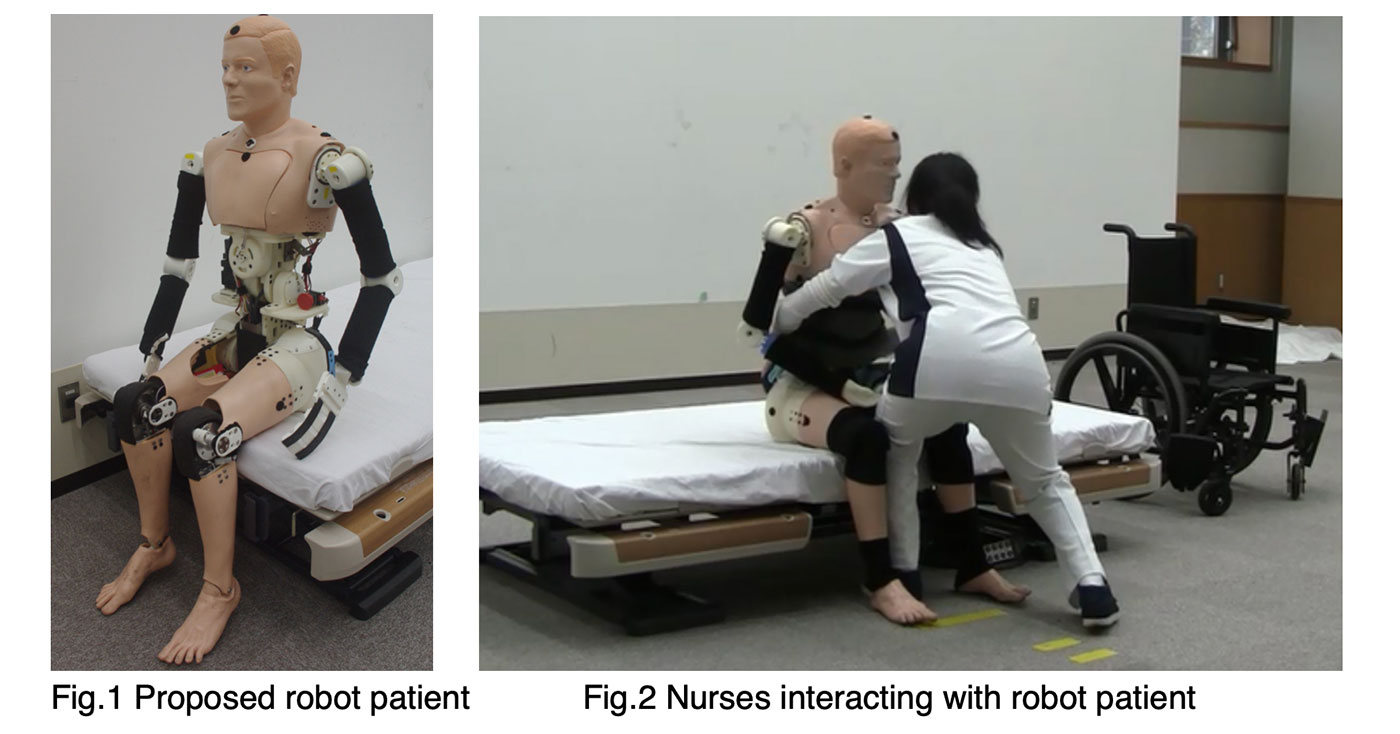
It is critically important for the nurses to accurately acquire skills to physically interact with patients such as patient transfer from bed to wheelchair. We are developing a robot patient which could accurately reproduce the patients’ limb movements and interact with the
trainee. The students are expected to learn the skills required for interacting with various patients by practicing with the robot that imitate different patients.
-

-
Researcher
Jun Ota